

|
All the animals discussed so far had 'bilateral symmetry': like a loaf of bread, their bodies can be divided in left and right halves that are mirror images of one another. Each half has distinguishable front and rear parts, as well as top and bottom parts. On Earth, animals such as jellyfish and starfish have 'radial symmetry', which means that instead of having just two halves their bodies can be divided in more than two similar segments. That would be eight segments in the spidrids' case, so you may imagine their bodies as a pizza cut up in eight identical slices. On Earth, no animals with radial symmetry walk quickly. On Furaha, spidrids do, and here's one. It is the somewhat robust, or even rotund, 'beach ball'. |
|
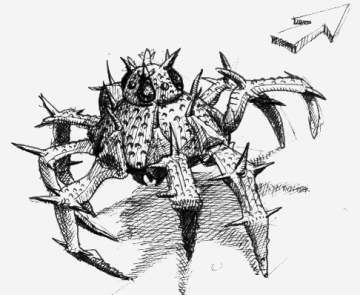
This one is the so-called 'Crown of Thorns'. There are many species of spidrids, and their size varies from small enough to burrow under your toenails to large enough not to fit in your boots (like this one). One of the more odd consequences of a radial build is that the animal does not have a front or a rear (it does have a top and a bottom though). The lack of a front means that it does not matter in which direction the animal moves, as it can move in any direction it wants to. Such animals also do not need to turn their bodies to change direction. |
|
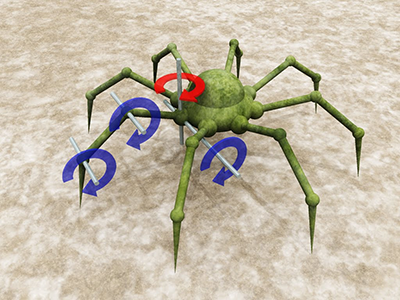 |
This model shows the way the joints of spidrids work. One joint at the base of the legs (there are several closely-spaced joints there) serves to rotate the leg in a clockwise or anticlockwise rotation, indicated by the vertical axis of the joint and the red arrow showing the direction of rotation; that type of movement is called 'promotion' and 'remotion'. Furahan scientists copied the name for the movements from those used for Earth crabs, whose legs are surprisingly like those of spidrids. Crabs do have a front though, and 'promotion' for crabs means the legs rotate forwards. In spidrids the animal has no front end, so 'promotion' came to mean 'anticlockwise', when the animal is seen from above. It is likely that the scientists in question did not known the Latin word for 'clockwise', otherwise they would probably have used it. |
|
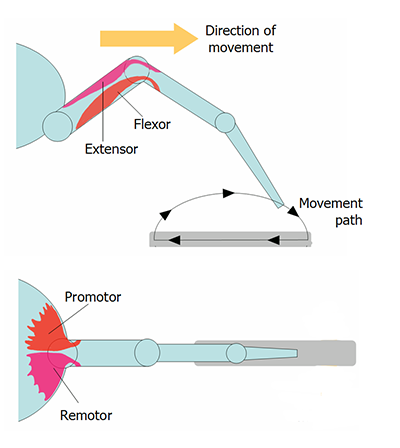
The other diagram shows the muscles controlling all this. The promotor and remotor muscles, together with the flexor and extensor muscles, create a 3D movement. Those spidrid legs that stick out sideways, at a cross angle to the direction of movement, derive most of their power from the promotor and remotor muscles, while the flexor/extensors muscles of these legs do not contribte much power. The legs that are parallel to the movement direction face a different challenge: their propulsive power is mostly derived from the flexor and extensor muscles. Complicated, isn't it? For more explanations regarding the way spidrids move, search the Furaha blog for spidrids; this is a good post to start with. |
|
|
Spidrid in 'clockwise walk' gait Here a simple 'walk' is shown, in which no two legs move in unison. The walking cycle is divided into phase differences of 12.5%. The spidrid shown here has such differences, but it is not that easy to find out what the order of movement is by just looking, because the phases skip a leg for each phase offset. If the legs are numbered around a circle, like the hours on a clock, leg 1 is at phase zero, leg 3 gets phase 12.5%, leg 5 phase 25.0%, leg 7 gets 37.5%, and then we go around again: leg 2 gets 50%, leg 4 gets 62.5%, etc. The diagram on the ground shows which legs are on the floor at any moment, and therefore forms a 'support diagram'. For a slow moving animal the centre of gravity should always be poised over the support diagram, or else the animal will fall. As you can see, there are four ot five legs on the grond at any moment, so there is no risk of falling with this gait. |
|
Spidrid in paired gait |
|
|
Spidrid with a 'transverse predilection' gait |
|
Spidrid in 'longitudinal predilection' gait |